Object Tracking
Given sequential rectified stereo images with camera information, the objects (including vehicles and passengers) should be detected and tracked across image frames. As the output, the object bounding box, tracking ID, and distance from the box center to the camera optic center should be reported and shown in the video.
Radar Map
Generated radar map based on the output of object tracking and distance estimation, which could clearly observe the traffic conditions on the road in real-time.
Deep learning model selection
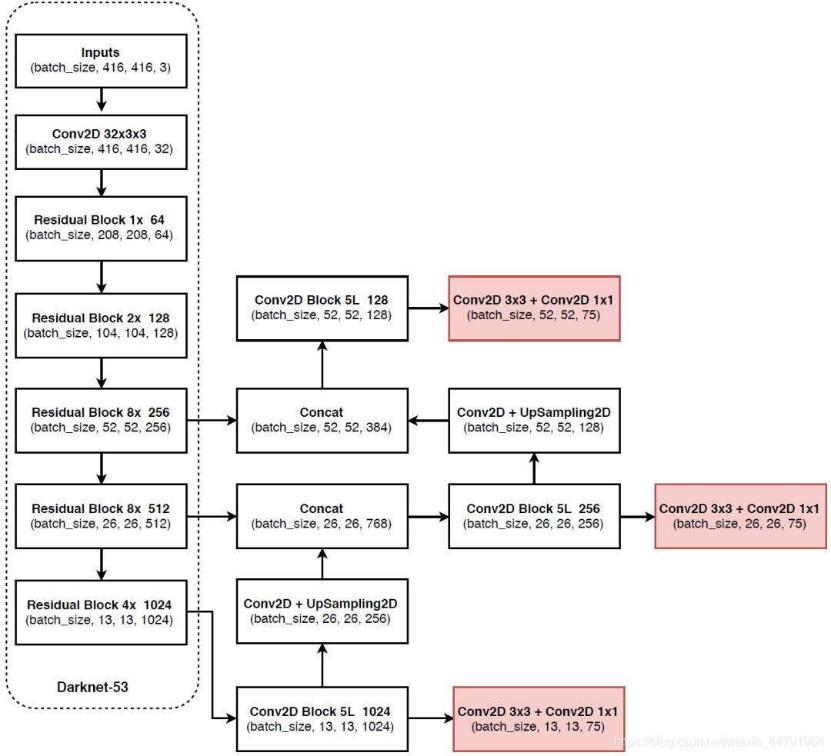
Compared to the traditional CV detection methods, YOLOv3 has the advantages of detection speed and accuracy and meets the real-time requirements for object detection. Here is the structure of the model.